Scientists claim that a new robot that they designed can leap 400 feet in the air, which is as high as the Statue of Liberty. Their goal is to one day send the robot to space where its jumping abilities increase.
High-Jumping Robot
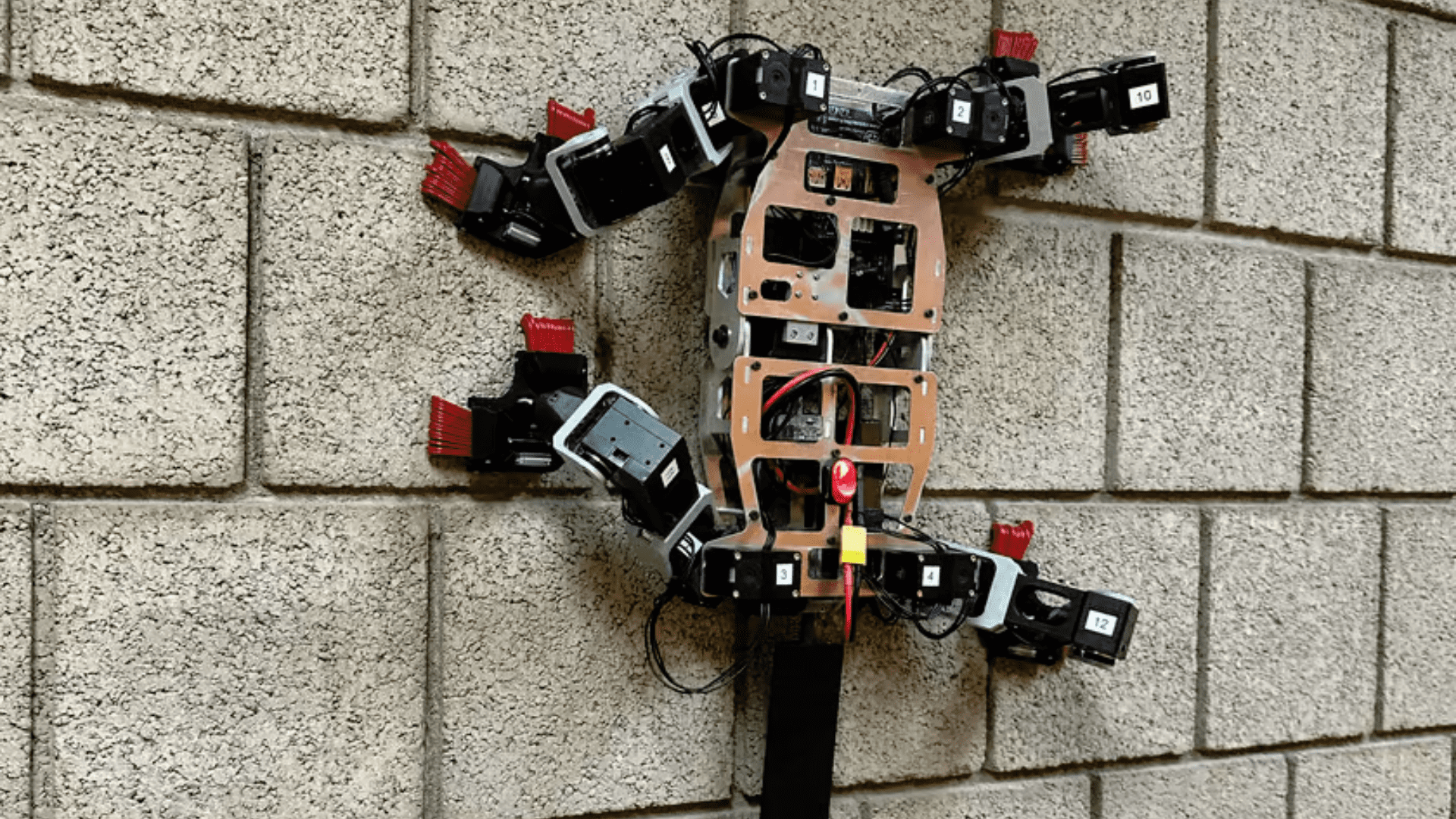
The high-jumping robot is designed to explore rough terrain like caves, forests, and possibly other planets. Its unique design includes prism-shaped legs with stretchable springs. These features allow the robot to maximize the transfer of elastic energy into kinetic energy during a jump. Researchers from the University of Manchester say the design could enable the robot to jump six times higher than the current record of roughly 100 feet. They published their findings in the journal Mechanism and Machine Theory.
Demonstrating the Design
They built a 15.7-inch robot that jumps more than five feet in the air to demonstrate their design theory. “While jumping robots already exist, there are several big challenges in the design of these jumping machines, the main one being to jump high enough to overcome large and complicated obstacles,” said the study’s co-author, John Lo. “Our design would dramatically improve the energy efficiency and performance of spring-driven jumping robots.”
Typically, robots boast legs or wheels for moving around. While these are traditional features, they don’t work well in difficult terrain. This is where jumping mechanisms come in handy.
Additionally, the researchers found that traditional hopping robots are inefficient because they take off before fully releasing their spring power, which limits their maximum height. Researchers also discovered that traditional jumping bots waste energy by moving side to side or rotating rather than straight up.
Harnessing Jumping Power
Typical jumping robots use motors to store energy in a spring and then release that energy to propel the robot upwards. Power amplification is a mechanism seen in fleas or locusts where stored elastic energy is transformed into kinetic energy, which results in higher jumps. Previous jumping robots utilized this mechanism, but because they take off before the spring is fully released, the elastic energy isn’t fully turned into kinetic energy.
Co-author Ben Parsley said in a statement, “There were so many questions to answer and decisions to make about the shape of the robot, such as, should it have legs to push off the ground like a kangaroo, or should it be more like an engineered piston with a giant spring?”
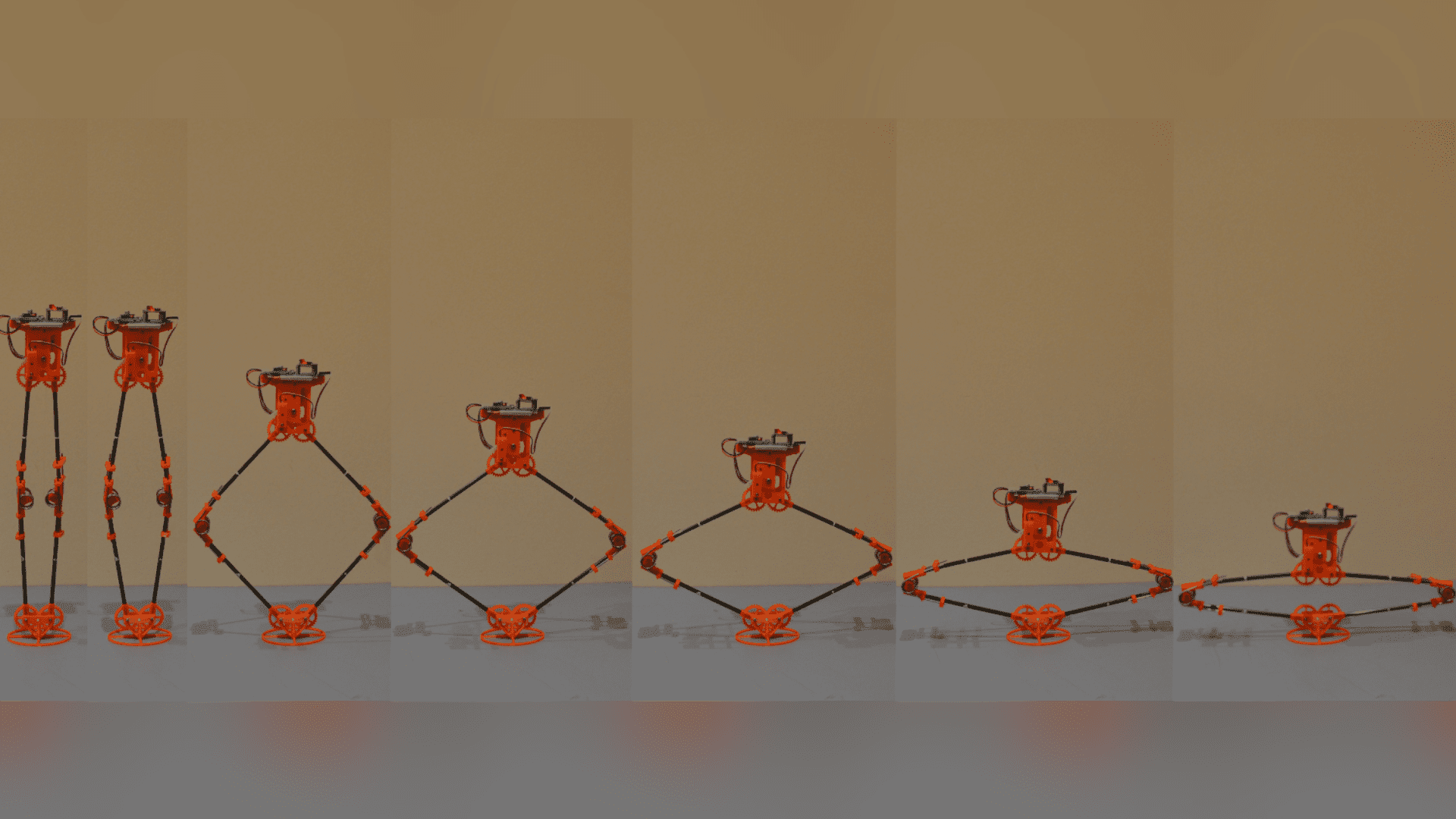
The researchers looked at two robot models to test which design was best. One has a straight-line “prismatic” system, and the other has a rotational system. The prismatic model’s legs move like pistons, like a pogo stick. However, the extra weight at the bottom limited the spring’s extension before leaving the ground. Meanwhile, the rotational model featured legs similar to a kangaroo’s. However, the robot’s legs left the ground before the spring could fully release its energy. Again, it limited the height and effectiveness of the jump.
The researchers addressed this issue by combining the best of both models. They shifted the weight to the top, making the bottom lighter and more streamlined. As a result, its stability and energy efficiency improved. In addition, the straight-moving prismatic legs with springs that extended linearly mitigated delayed or premature take-offs.
Scientists are working on controlling the direction of the jumps and harnessing the energy generated when the robot lands. This could increase the number of jumps it can do in a single charge. They also plan to explore more compact models for space exploration.