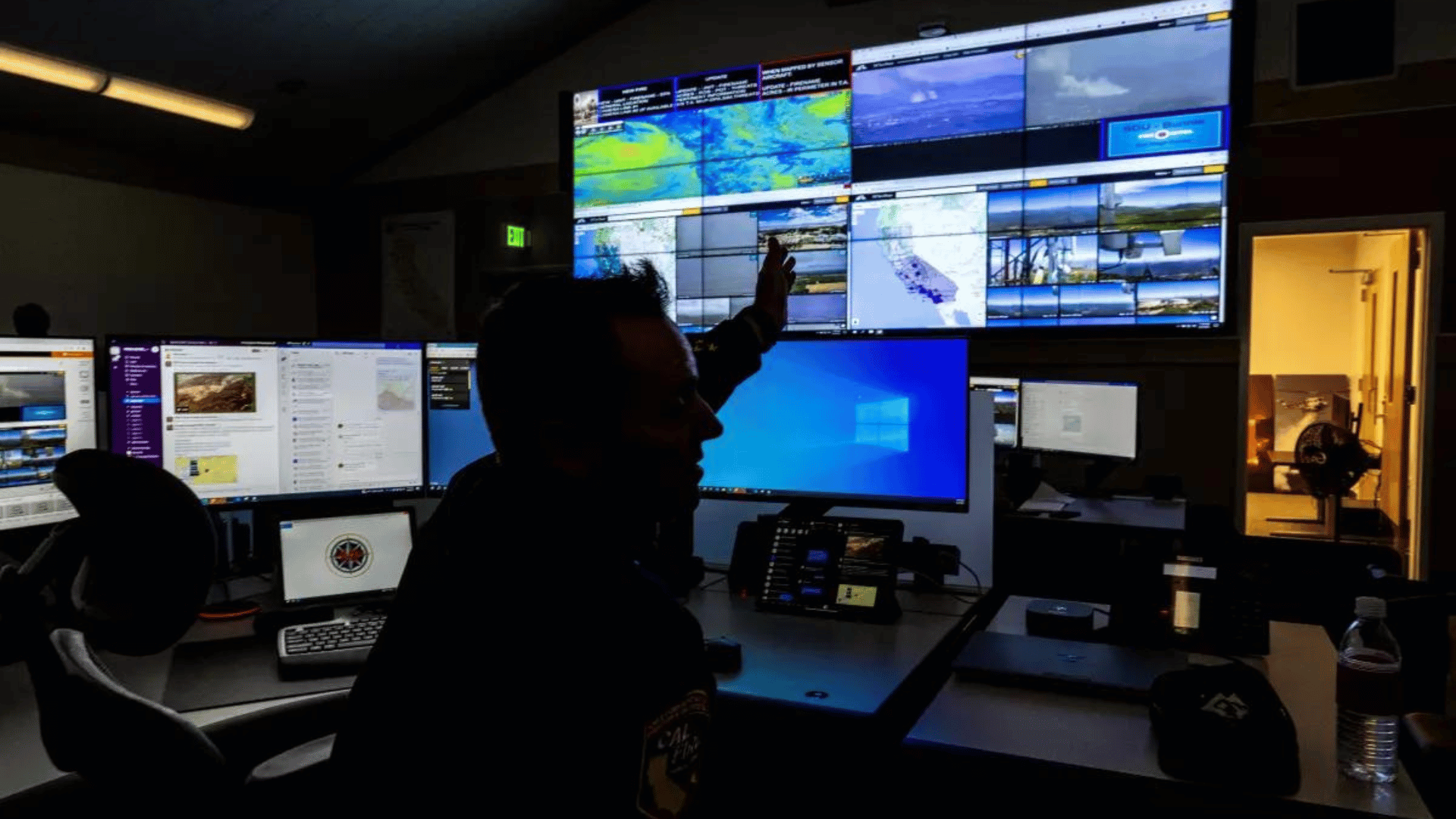
Natural disasters worldwide damage buildings, electrical lines, and more every year. Rescue efforts are critical for first responders in these situations. Researchers at Carnegie Mellon University in Pittsburgh, PA, developed a system that allows aerial robots to communicate during rescues.
Robot Exploration

The new method CMU’s Robotics Institute developed involves autonomous aerial robots and multirobot coordination inside abandoned buildings. It could help first responders gather information and make decisions after a disaster.
“A key idea of this research was avoiding redundancy in exploration,” said RI Ph.D. student Seungchan Kim. “Since this is multirobot exploration, coordination and communication among robots is vital.” Kim added, “We designed this system so each robot explores different rooms, maximizing the rooms a set number of drones could explore.”
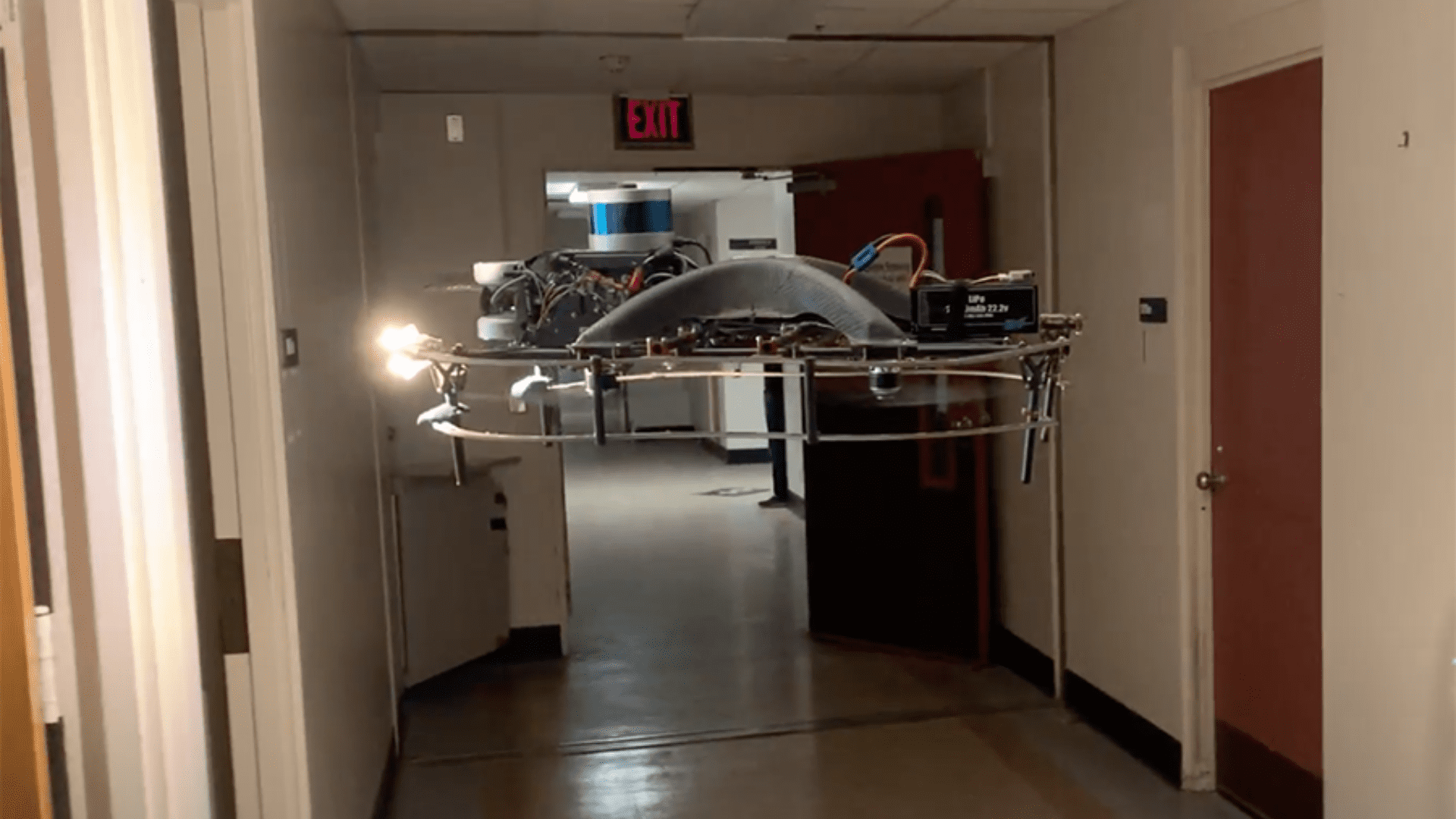
According to the researchers, the drones focus on quickly detecting doors because people are likelier to be in rooms rather than corridors. To find targeted entries, the robots process the geometric properties of their surroundings with a lidar sensor. While gently hovering about six feet high, the drones transform the 3D lidar point cloud data into a 2D transform map. As a result, the map provides a layout of the space as an image. Then, the robots analyze the map for “structural cues” that signify doors and rooms.
Robot Communication
Walls appear as closed pixels close to the drone, while doors and passageways appear as open pixels. Researchers modeled the doors as saddle points, allowing the robot to identify and pass through passageways quickly. Then, when a robot enters a room, it appears as a circle.
According to the researchers, they chose lidar sensors over a camera for two reasons. One, the sensor uses less computing power. Two, the disaster site could be smoky or dusty, impairing the vision of a traditional camera.
Researchers say there is no centralized base controlling the robots. Instead, each robot makes its own decisions and determines optimal paths based on understanding the environment and communicating with other robots. The aerial robots share information, like which rooms or doors they explored, with one another. They use this information to avoid rooms that are already clear or being cleared.